

RT-DETR的K折交叉验证版本改进策略
本文介绍RT-DETR的K折交叉验证版本改进策略,包括K-fold的添加过程、使用说明以及开源代码
Labelme的安装与使用
本文介绍Labelme的安装与使用,包含labelme标签格式转换代码

Git笔记
Git学习笔记(更新中)
目标检测评价指标总结
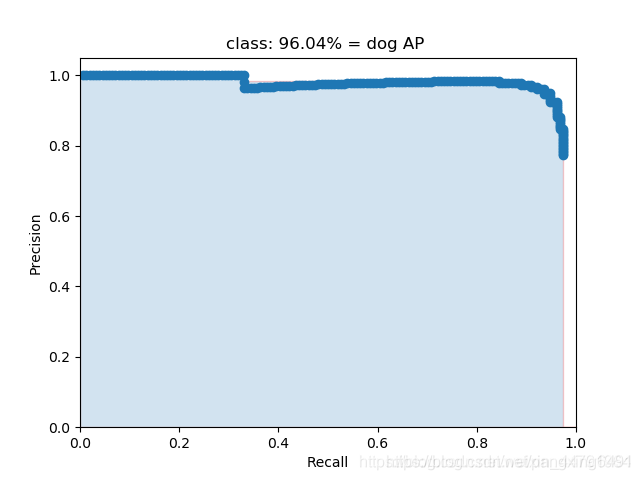
目标检测常见评价指标及原理的介绍

深度学习中模型效率的三大指标:内存、计算量(FLOPs)和参数量(Params)的介绍
内存、计算量(FLOPs)和参数量(Params)的介绍
DETR三则
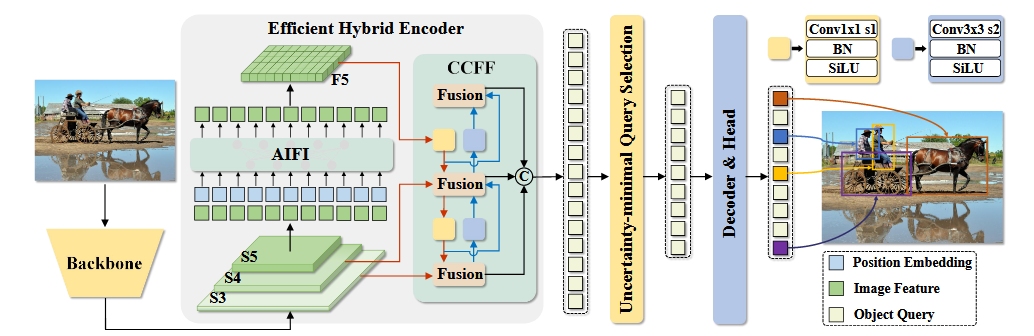
本文讨论DETR系列网络,包括DETR、DeformableDETR和RTDETR(持续更新中)
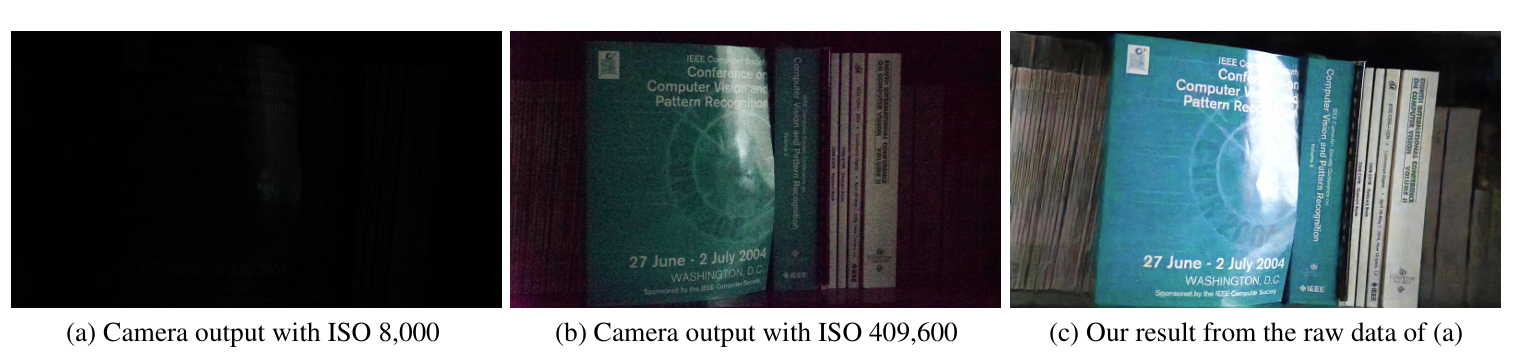
低光增强评价指标(配对)
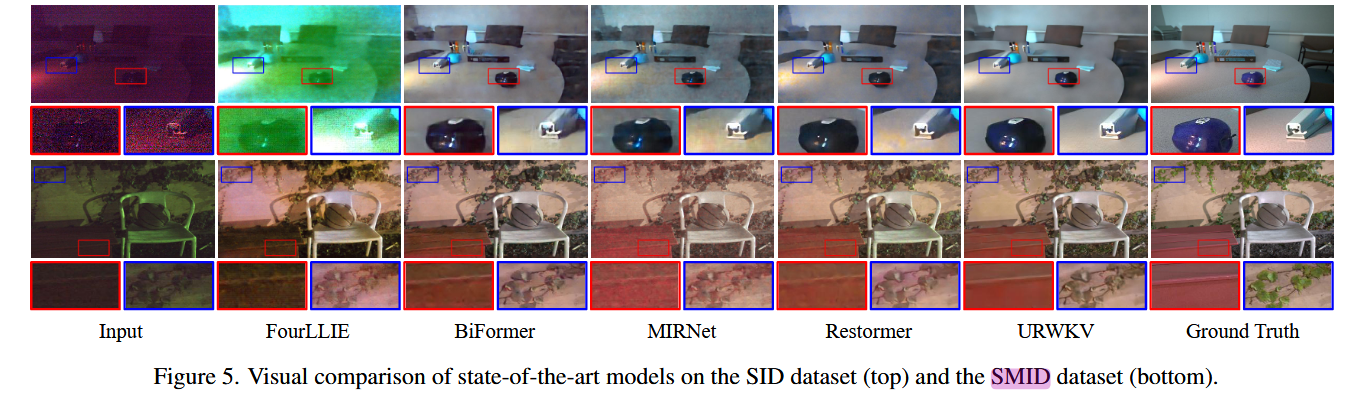
在配对数据集中的低光增强评价指标中主要有SSIM、PSNR、LPIPS三种。 参考文献:低光图像增强 评价指标 图像的峰值信噪比(PSNR)的计算方法 SSIM (Structure Similarity Index Measure) 结构衡量指标+代码 LPIPS 图像相似性度量标准、感知损失(Perceptual loss) PSNR PSNR(Peak Signal-to-Noise Ratio) 中文名称峰值信噪比,单位为DB,他说用来衡量图像大小为的真值图像与增强图之间的差异,数值越高表明二者差异越小,说明增强后的图像失真越小,一般大于30db就表明图像质量很好。PSNR的计算方法如下: 其中,表示图像点颜色的最大数值;MSE为图像的方差,定义为: 。 SSIM SSIM(## Structural Similarity Index Measure),中文名为结构相似性。用于衡量两幅图像相似性的指标。与PSNR相比,SSIM更关注图像结构、亮度和对比度等方面的差异,能够更好地反映人类对图像质量的主观感知。SSIM...
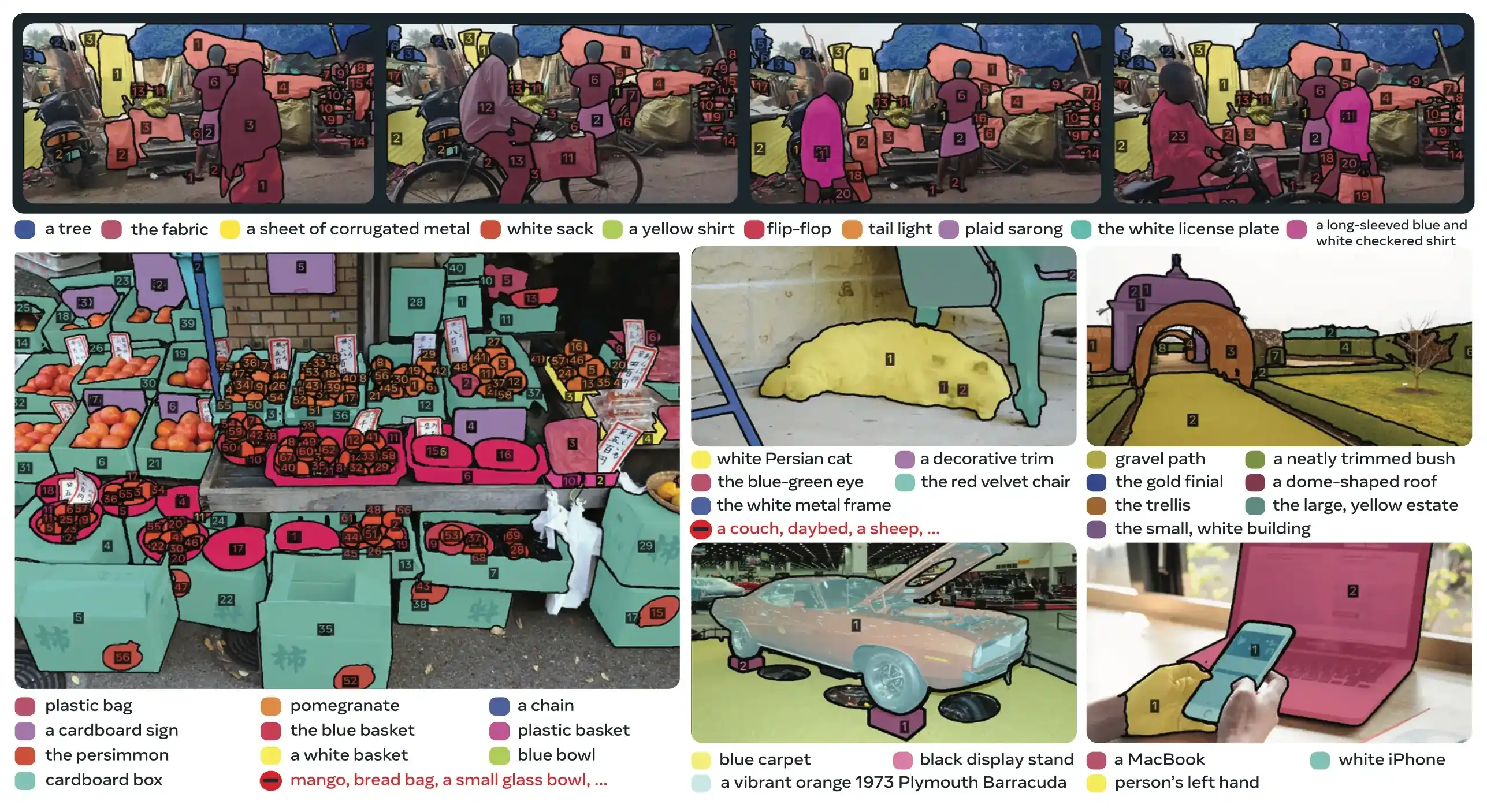
SAM3部署跑通踩坑记录——用低版本CUDA118跑通SAM3
感谢大佬Coding茶水间的博客SAM3模型来了,手把手带你运行SAM3模型代码,SAM3模型初探!的指导 SAM3是2025年新发布的大模型,对配置要求较高,很多教程都提到了CUDA ≥ 12.6,但本人用组内的3090服务器(CUDA118)亲测可用,以下是本人的部署过程(踩坑指南),本人比较愚笨,只会用笨办法。 以下教程适合Linux,Win系统指路Coding茶水间大佬的文章。 1、SAM3源码与权重下载 SAM3的源码可在gitbub上下载,权重需要在Hugface上单独申请,但据说不太容易申请到,国内Modelscope上已经有大佬上传了权重,权重直接放在sam3路径下就可以。导入权重后需要按照第3章修改下配置。 2、环境搭建 环境搭建基本照抄官方教程 创建新的 Conda 环境: 123conda create -n sam3 python=3.12conda deactivateconda activate sam3 安装支持 CUDA 的...

低光增强数据集
本文汇总了目前主流的配对的低光图像数据集
低光增强损失函数
本文记载了在Low Light Image Enhancement任务中常见的损失函数