低光增强数据集
本文汇总了目前主流的配对的低光图像数据集。
1 LOLV数据集
LOL数据集包含LOL-v1和LOL-v2两个版本,其中LOL-v2进一步划分为LOL-v2-real(真实世界数据)和LOL-v2-sync(合成数据)。具体而言,LOL-v1包含500对从真实自然场景中采集的低光/正常光图像,其中485对用于训练,15对用于测试。LOL-v2-real包含698对训练图像和100对测试图像;LOL-v2-sync则包括900对训练图像和100对测试图像。
1.1 LOLv1数据集
下载地址
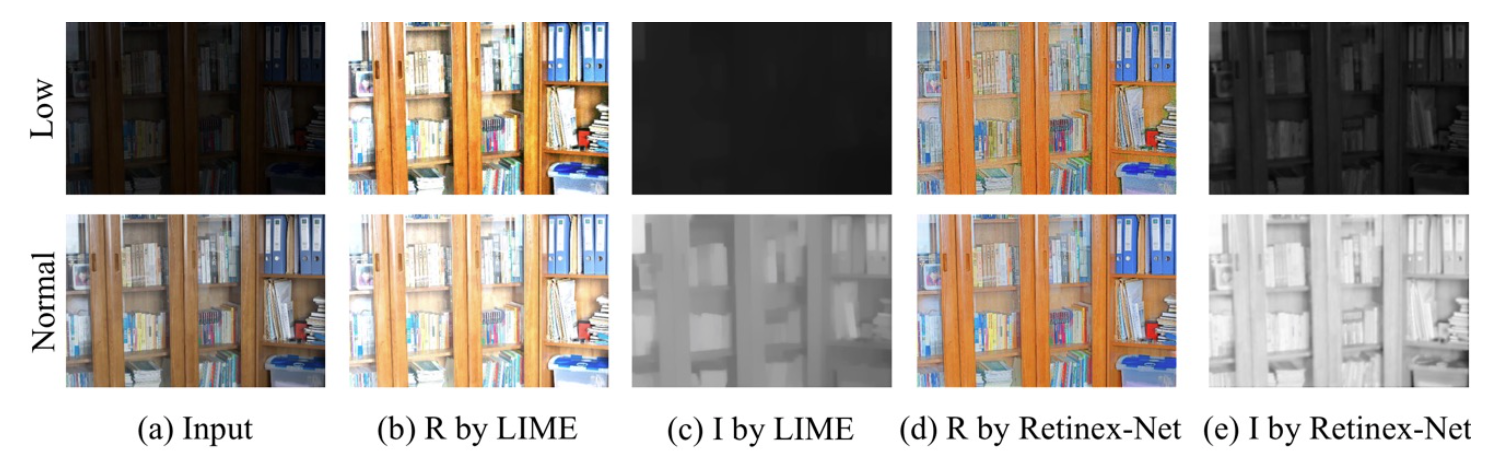
来源文献:Deep Retinex Decomposition for Low-Light Enhancement
1.2 LOLv2数据集
下载地址
来源文献:Sparse gradient regularized deep retinex network for robust low-light image enhancement
- Training Set: 689 images
- Testing Set: 100 images

2 SID数据集
下载地址 Github详情页 Retinexformer作者也为我们提供了转换后的下载地址转换后的下载地址
来源文献:Chen Chen, Qifeng Chen, Minh N Do, and Vladlen Koltun. Seeing motion in the dark. In ICCV, 2019
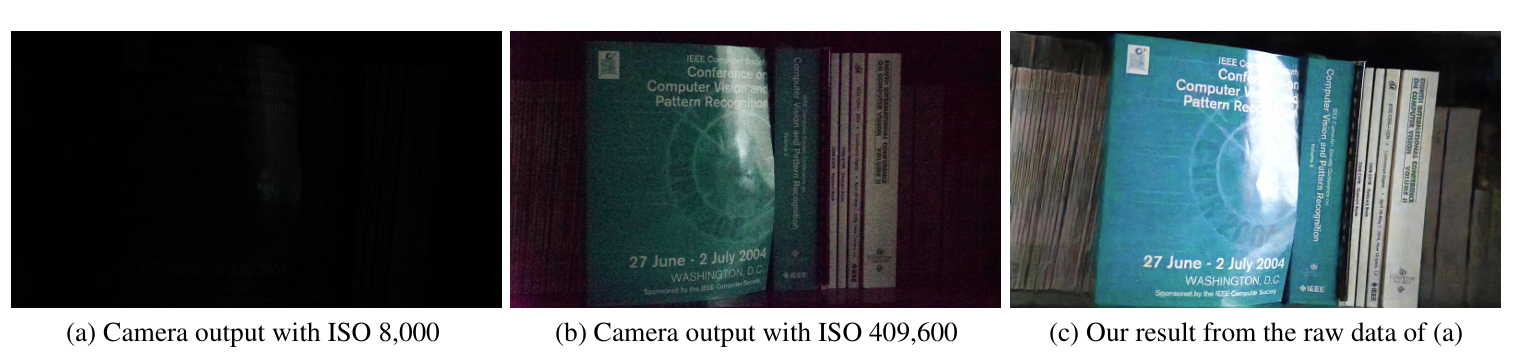
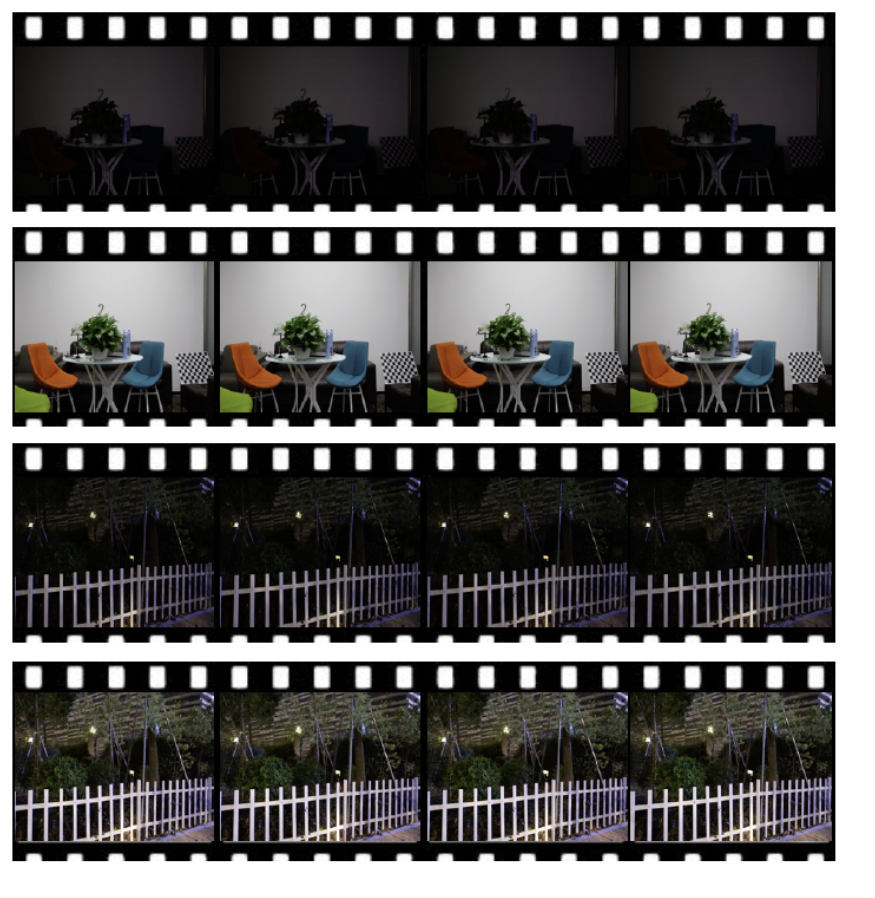
数据集包含 5094 张原始短曝光图像,每张图像都有相应的长曝光参考图像。请注意,多个短曝光图像可以对应于同一个长曝光参考图像。例如,我们收集了短曝光图像序列来评估连发去噪方法。序列中的每个图像都算作一个不同的低光图像,因为每个这样的图像都包含真实的成像伪影,并且对训练和测试很有用。SID 中不同的长时间曝光参考图像的数量为 424。该数据集包含室内和室外图像。户外图像通常是在夜间、月光或街道照明下拍摄的。户外场景中相机处的照度一般在0.2勒克斯到5勒克斯之间。室内图像甚至更暗。他们是在封闭的房间里被捕获的,房间里关闭了常规的灯光,并为此目的设置了微弱的间接照明。室内场景中摄像机的照度一般在0.03勒克斯到0.3勒克斯之间。输入图像的曝光设置为1/30秒和1/10秒之间。相应的参考(地面实况)图像是在 100 到 300 倍的曝光时间下捕获的:即 10 到 30 秒。由于参考图像的曝光时间必然很长,因此数据集中的所有场景都是静态的。表1总结了数据集。参考图像的一小部分如图 2 所示。每个条件下大约 20% 的图像被随机选择来形成测试集,另外 10% 被选择用于验证集。图像是使用两台相机拍摄的:索尼 α7S II 和富士 X-T2。这些相机有不同的传感器:索尼相机有一个全画幅拜耳传感器和图 2。 富士相机有一个 APS-CX-Trans 传感器。这支持对不同滤波器阵列生成的图像进行低光图像处理管道的评估。索尼图像的分辨率为 4240×2832,富士图像的分辨率为 6000×4000。索尼套装是使用两种不同的镜头收集的。
有 2697 对短/长曝光 RAW 图像。低光/常光RGB图像是通过使用SID 相同的相机内信号处理将RAW转换为RGB来获得的.2099 和 598 个图像对用于训练和测试。
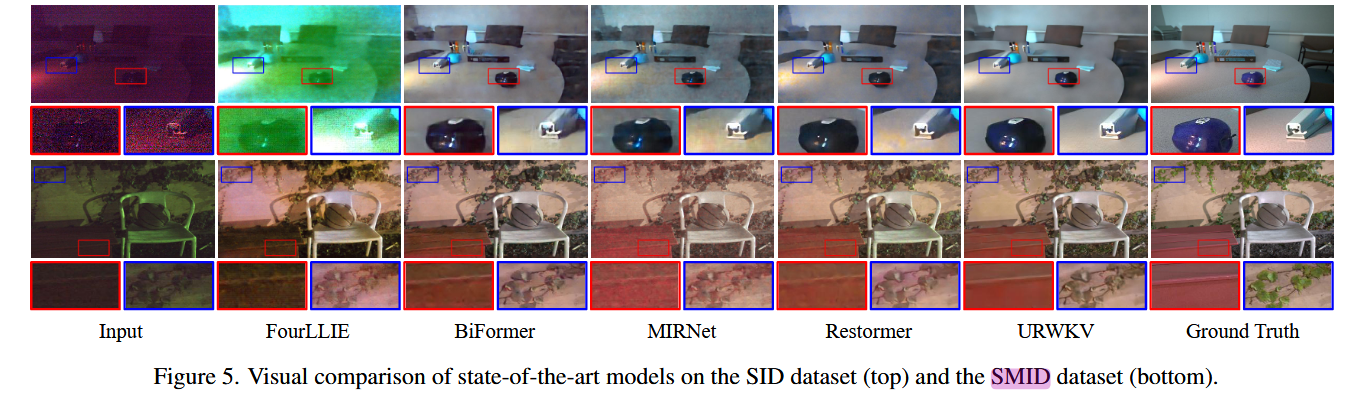
3 SMID数据集
下载地址
来源文献:Chen Chen, Qifeng Chen, Jia Xu, and Vladlen Koltun. Learning to see in the dark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 3291–3300, 2018. 6
全称是 See-in-the-Dark for Smartphone Images Dataset,SMID数据集总共包含20,809个短曝光/长曝光RAW图像对。同样需要将RAW数据转换为sRGB域以进行实验。使用 15,763 对进行训练,其余对用于测试。
4 LOLBlur数据集
下载地址
文献来源:LEDNet: Joint Low-light Enhancement and Deblurring in the Dark (ECCV 2022)
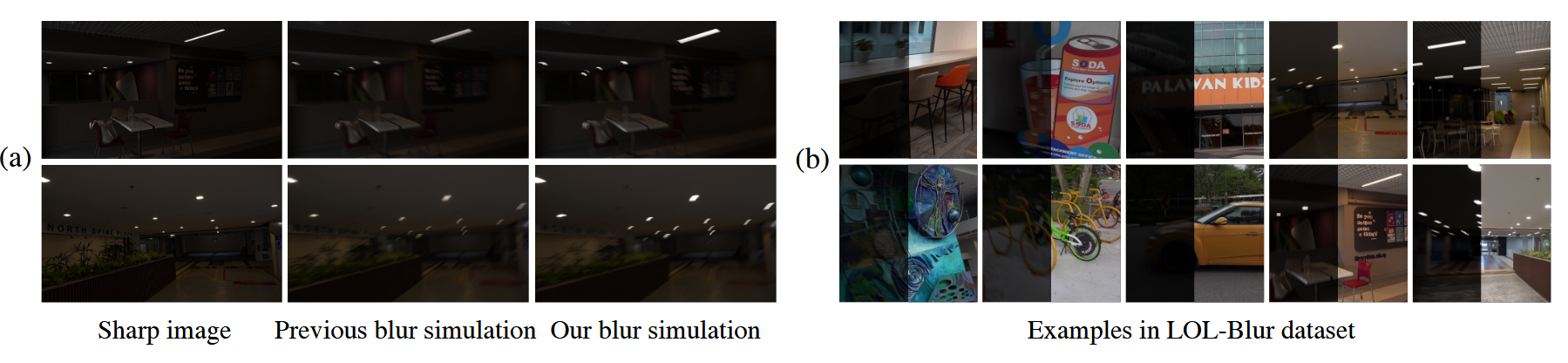
这是一个以以逼真的方式生成的合成数据集,原作者引入了一种合成管道,该管道可以联合模拟低光模糊退化,从而能够生成大规模数据集(LOL-Blur)。共使用了 170 个用于训练的视频和 30 个用于测试的视频,每个视频有 60 帧,总计 12,000 个配对数据。生成的数据集 LOL-Blur 包含 12,000 对低模糊/正常锐度对,用于训练和测试。
5 MIT-Adobe FiveK数据集
下载地址 数据发布页
来源文献:Vladimir Bychkovsky, Sylvain Paris, Eric Chan, and Fre ́do Durand. Learning photographic global tonal adjustment with a database of input/output image pairs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 97–104, 2011. 7
MIT-Adobe FiveK 数据集分为训练集和测试集,分别有 4500 和 500 对低光/常光图像对。这些图像由五名摄影师手动调整(标记为 A∼E)。在Retinexforemr中以专家C的调整图像为参考,采用sRGB输出模式。
6 SDSD数据集
下载地址 数据发布页
SDSD 包含室内和室外子集。在Retinexformer中分别使用 62:6 和 116:10 低光/常光视频对对 SDSD-室内和 SDSD-室外进行训练和测试。
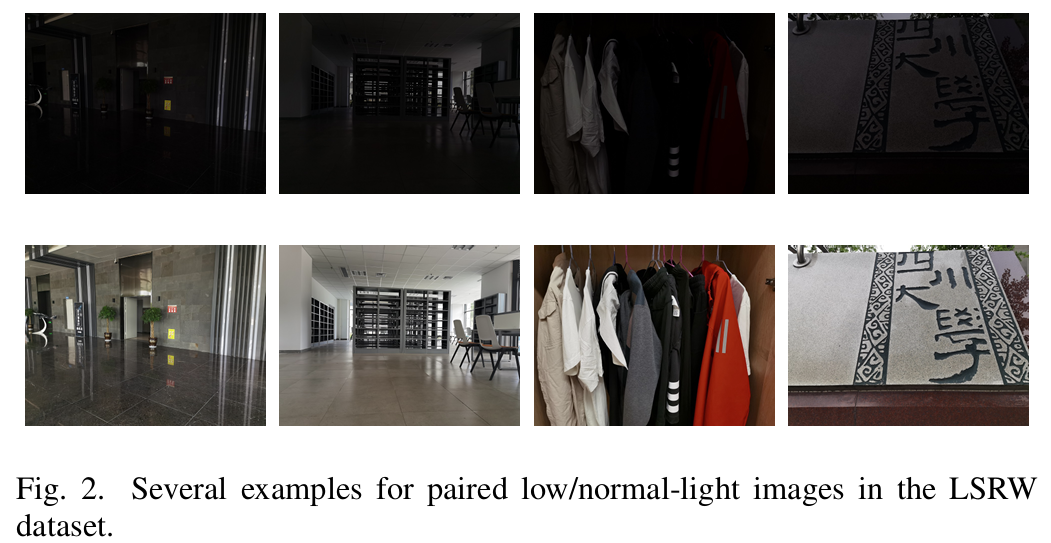
7 LSRW
下载地址
来源文献:R2RNet: Low-light Image Enhancement via Real-low to Real-normal Network
包括来自 DSLM Nikon 相机和华为智能手机的图像。LSRW-Nikon数据集由3150个训练图像对和20个测试图像对组成。LSRW-华为数据集分别包含 2450 对图像和 30 对用于训练和验证的图像。
8 NTIRE 2024低光增强比赛数据集
下载地址 比赛介绍
来源文献:NTIRE2024ChallengeonLowLightImageEnhancement:MethodsandResults
引入了丰富的比赛场景,涵盖各种照明条件,如昏暗环境、极度黑暗、非条件,如昏暗环境、极度黑暗、非均匀照明、背光和夜景等。照明、背光和夜景等各种照明条件。适用于白天和夜晚的室内和室外环境。图像分辨率高达 4K 或更高。具体来说数据集包括 230 个训练场景,以及35 个验证场景和 35 个测试场景。验证和测试的地面实况(GT)验证和测试的地面实况(GT)图像在整个挑战赛期间对参赛者保密。
FiveK
下载地址
来源文献:Vladimir Bychkovsky, Sylvain Paris, Eric Chan, and Fre ́do Durand. Learning photographic global tonal adjustment with a database of input/output image pairs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 97–104, 2011. 7
